



製品情報
- ホーム
- 製品情報
- 3Dビジョンセンサー YCAM3D/YCAM3DM
3Dビジョンセンサー YCAM3D/YCAM3DM
ハンドアイに最適な高精度3Dビジョンセンサー
製品の概要
産業用ロボットへの取り付けが可能(ハンドアイ)な高精度3Dビジョン
特徴
- ハンドアイに最適な高精度3Dビジョンセンサー
- 高速撮影 VGA 0.14秒, SXGA 0.28秒
- GigE Visionカメラインターフェイス
- ロボット搭載を前提とした耐衝撃/耐振動設計
- ROS対応ドライバ「RoVI」とロボットビジョン「VT-ビジュアルティーチ」をGithubに公開
- Windows10対応ドライバ/SDKを提供
- 撮像距離と視野サイズに応じて6タイプから選択〜インターフェイスは全モデル共通
YCAM3D

- ハンドアイに最適な小型軽量3Dビジョン
- WD=200〜700mm
- 視野=□100mm〜1000mm
YCAM3DM

- パレットサイズのハンドアイに最適
- WD=800〜2500mm
- 視野=□800mm〜2500mm
仕様
3Dビジョンセンサー製品仕様
| 項目 | YCAM3D | YCAM3DM | ||||
|---|---|---|---|---|---|---|
| 製品画像 | |
|
||||
| カメラセンサ | 130万画素モノクロCMOSセンサ、基線長80mm | 130万画素モノクロCMOSセンサ、基線長300mm | ||||
| カメラレンズラインナップ | 17M | 10M | 10L | 6 | 10 | 6 |
| 適用 | 狭視野/高精度 | 狭視野/ハンドアイ | ハンドアイ標準 | 広視野 | パレット/固定カメラ | パレット/ハンドアイ |
| 撮影範囲min/WD(mm) | 83×75/244 | 111×105/190 | 232×204/370 | 360×305/350 | 800×690/1300 | 770×705/800 |
| 撮影範囲mid/WD(mm) | 117×94/300 | 213×182/330 | 330×275/500 | 745×580/670 | 1220×950/1790 | 1720×1315/1500 |
| 撮影範囲max/WD(mm) | 124×113/360 | 234×209/380 | 455×385/700 | 764×614/700 | 1840×1500/3000 | 2175×1730/2000 |
| 精度(mm)/WD(mm) ※カメラ垂直方向の面間距離 |
±0.04/240〜330 | ±0.04/190〜330 | ±0.2/370〜500 | ±0.5 | ±0.5 | ±0.5 |
| ±0.08/190〜380 | ±0.4/370〜700 | |||||
| プロジェクター出力 | 1.5W | 2.5W | ||||
| 撮影方式 | ステレオ位相シフト方式、HDR機能搭載 | |||||
| 露光時間設定 | 4,8,16,25,33,50ミリ秒 | |||||
| 撮影時間 | VGA0.14秒,SXGA0.28秒 | |||||
| 点群出力時間 | 100万点出力約0.26秒(PCの性能による) | |||||
| カメラパラメータ | カメラ内フラッシュROMから読出し | |||||
| データ出力 | 点群PLYファイル | |||||
| 使用周囲温度 | 0〜40℃ | |||||
| 防塵防滴機能 | IP54 | |||||
| PC側対応OS | Linux/ROS, Windows10 ※いずれも64bitOS | |||||
| PCインターフェイス | Gigabit Ethernet(JumboPacket対応要) | |||||
| 重量 | 800g | 1.6kg | ||||
| 外形寸法 | 120(W)×127(D)×47(H) ※コネクタ部を除く |
360(W)×135(D)×58(H) ※コネクタ部を除く |
||||
| 電源 | DC24V,4A | DC24V,8A | ||||

システム構成図
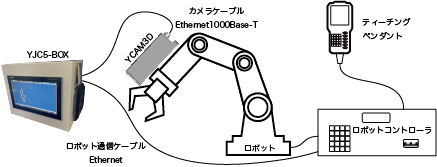
ビジョンコントローラ
| 項目 | YJC5 | YJC5ーBOX |
|---|---|---|
| 製品画像 |  |
 |
| PC | VECOW SPC-5600A(6コア),64GByteフラッシュROM | |
| OS | Linux Mint20.2-xfc3-64bit | |
| 表示器 | なし | 15インチ(解像度1366×768) |
| 入力デバイス | キーボード、マウス付属 | タッチパネル、キーボード、マウス付属 |
| アプリケーション | VisualTeach/ROS Noetic Samba,VNC(vino),Meshlab,インストール済 |
|
| UPS | なし | 内蔵 |
| カメラ電源 | なし | 内蔵(DC24V 4.5A) |
| 供給電源 | DC 24V20Aまたは 単相AC100V,6A(専用ACアダプタ) |
単相AC100V,6A |
| 外寸 | 210(W)×97(H)×105(D) | 500(W)×400(H)×250(D) |
| 重量 | 1.6kg | 20kg |
| サービスポート | LAN×4,RS-232C×4,USB×4,DVI,DisplayPort×2 | AC100×1,USB×1,LAN×1,配管ポート穴φ43×3 ※YJC5を内蔵しています |
VT~ビジュアルティーチの各社ロボット対応
| メーカ | 備 考 |
|---|---|
| 安川電機 | MotoPlusモジュールを提供します。 「ETHERNETデータ伝送機能」、「相対ジョブ」オプションが必要です。 |
| ファナック | KARELモジュールを提供します。 「ユーザーソケットメッセージ」オプションが必要です。 |
| 川崎重工業 | オプション不要 |
| デンソー | オプション不要 デンソーペンダントからカメラ操作可能 |
| 三菱電機 | オプション不要 |
| 不二越 | オプション不要 |
| エプソン | オプション不要 |
| Universal Robot | オプション不要 |