



Solutions/Track Record
- Home
- Solutions/Track Record
- Heavy object transfer
Heavy object transfer
Robotization (unmanned operation) of heavy object transfer
Examples of heavy object transfer
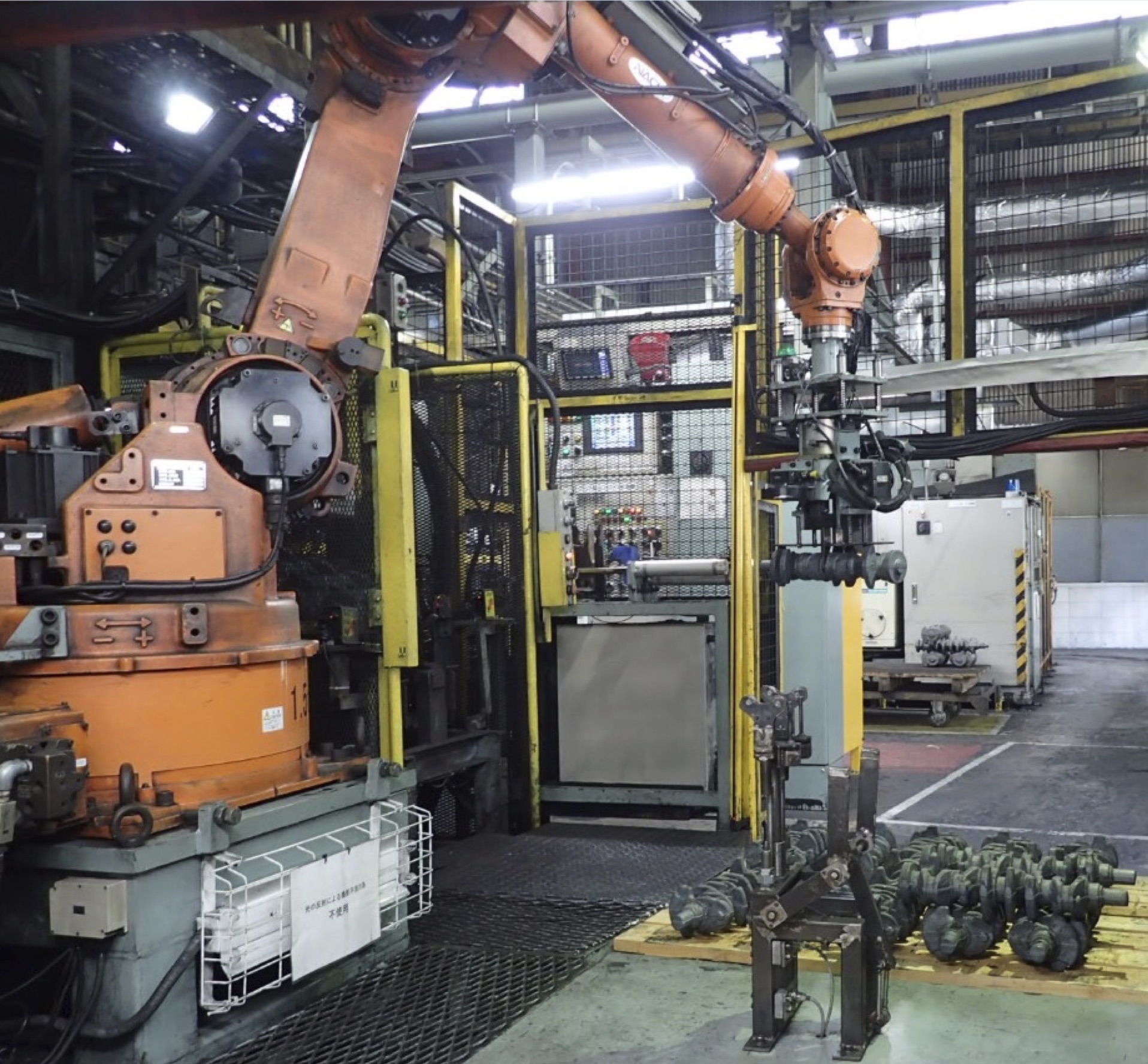
Crankshaft Transfer – Mazda Corporation
The YCAM3D 3D vision sensor is installed on a robot that transfers stacked crankshafts in a grid pattern on Mazda Motor Corporation’s SKYACTIV engine production line.
By using the visual teach function to accurately determine the robot’s gripping position and orientation, we have achieved crankshaft transfer without collisions between the robot and the workpiece or gripping failures.
Case study of crankshaft picking at Mazda Motor Corporation
System configuration
| item | Content |
|---|---|
| 3D vision sensor | YCAM3D-10L |
| software | VT (Visual Teach) Linux Mint 18.2 + ROS Kinetic |
| robot | Retrofitting to existing robots |
Conventional issues
Frequent short stops and collisions
The process involves depalletizing approximately 50 crankshafts stacked in a grid pattern on a pallet. However, 2D visual recognition is insufficient to accurately measure the distance to the workpiece or its orientation, resulting in frequent minor stoppages and collisions.

Support for older robots (retrofitting)
What made this project even more challenging was that the equipment itself was old, the robots being modified were over 10 years old, and even with manufacturer support, we often had trouble dealing with the issues.
Problem solving
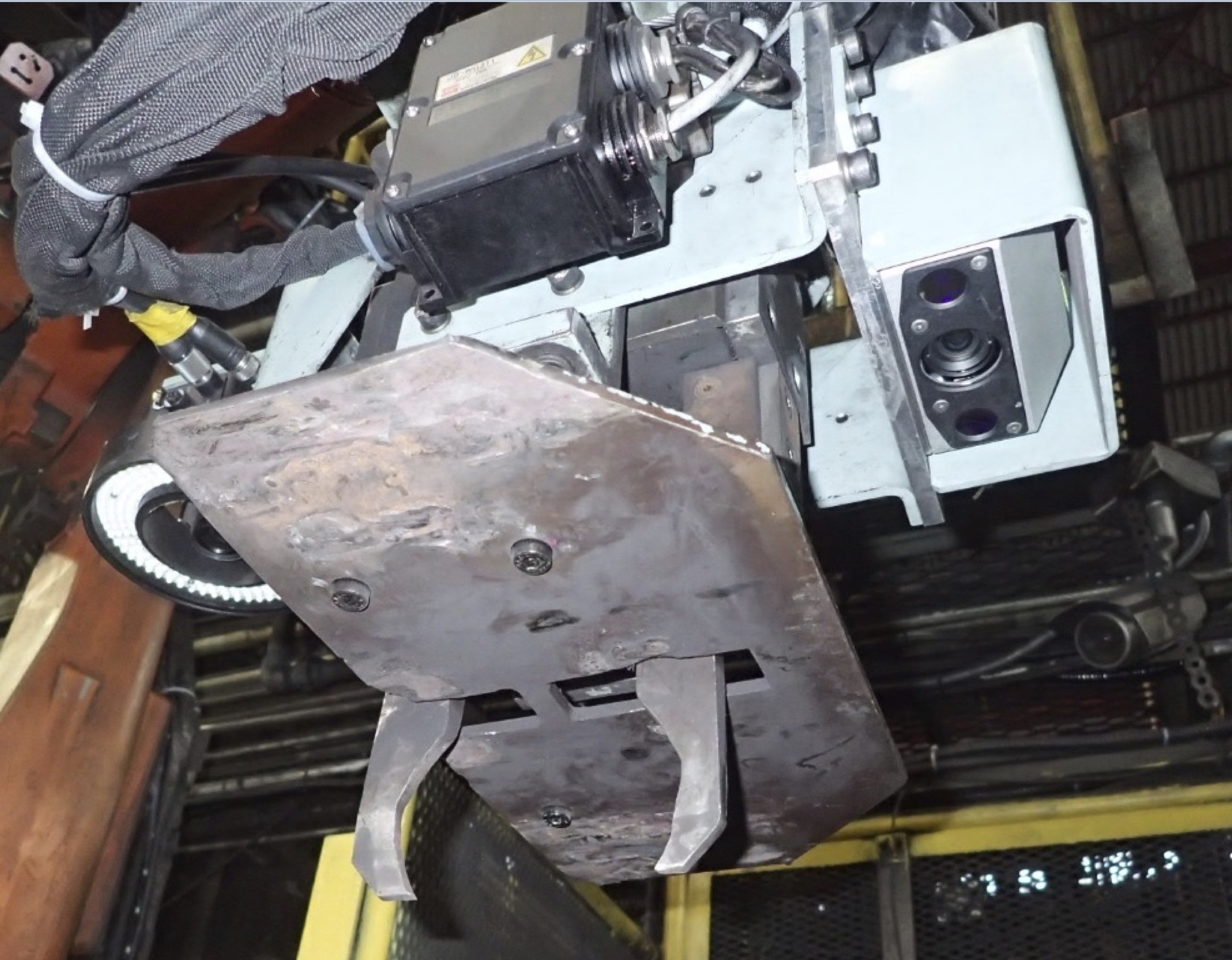
YCAM3D hand-mounted
A compact 3D vision system, “YCAM3D,” was installed in the empty space of the existing robot hand. By performing camera-robot calibration, the camera’s mounting position and orientation relative to the robot can be automatically determined.
3D recognition of the workpiece
The workpiece surface had various conditions, including black scale after forging, shot blasted finish, and oil and water residue, but there were no problems with capturing and recognizing it using YCAM3D. The recognition speed was also sufficiently fast, with the time required from the start of capture to the output of the recognition result being less than 1.5 seconds.
Summary of this solution
Superiority over 2D vision
1. Improved pick success rate
- For workpieces whose orientation was no longer horizontal due to load shifting or other reasons, 2D vision showed a gripping error of about 1/100.
- In 3D vision, this was reduced to less than 1/10000.
2. Recognition success rate improved
- Even if 3D vision fails to recognize an object in the first shot, it can be reshot and combined with the data from the first shot, improving the quality of the image. This reduces the probability of recognition failure.
Superiority over fixed 3D vision
1. Covers the entire range of robot movement.
- A fixed camera can only cover a portion of the robot’s operating range, such as pallets.
2. Implementation costs are less than half.
- If vision needs to be used at multiple locations within the operating range, a separate camera will need to be installed at each location.
- The mounting frame for the camera requires high rigidity, resulting in high initial costs. Hand-eye can be implemented at 1/2 to 1/4 the cost of a fixed 3D system.
3. High speed and high precision
- Because the camera is positioned close to the workpiece for imaging, the camera resolution can be lowered. Generally, visual teaching uses 330,000 pixels (640×480) for imaging, but during recognition, this data is further voxelized (downsampled) to a mesh size of 1mm to 2mm before use. On the other hand, other companies’ fixed vision systems use high-resolution cameras because they are positioned further away from the workpiece to capture a wider area.
- By reducing the camera resolution, data processing time can be significantly shortened. Depending on the workpiece, in this case, it takes about 1.5 seconds from the start of shooting to the output of the recognition result.
Detailed article
For more details on the cases mentioned here, please refer to the article in this “Press Release” .
* The images and videos on this page are used with the permission of Mazda Motor Corporation, and any reproduction or reuse elsewhere is strictly prohibited.