



Solutions/Track Record
- Home
- Solutions/Track Record
- AI Depaletizing
AI Depaletizing
Masterless, various judgments compatible with transformation, order control
Solution Overview
This system uses deep learning to recognize workpieces from 2D data acquired by a 3D vision sensor, and then determines the workpiece’s position and orientation from the 3D data of the recognition unit. It is effective for recognizing bags and boxes of arbitrary sizes.
Target work
- Bags
- 箱
- Aluminum ingot
The technologies used
Features
Learning Model
By using a pre-trained model specifically designed for bags, you can immediately recognize bags. The recognition rate can be improved by adding photos of actual workpieces (approximately 30-50 photos) using the following procedure.
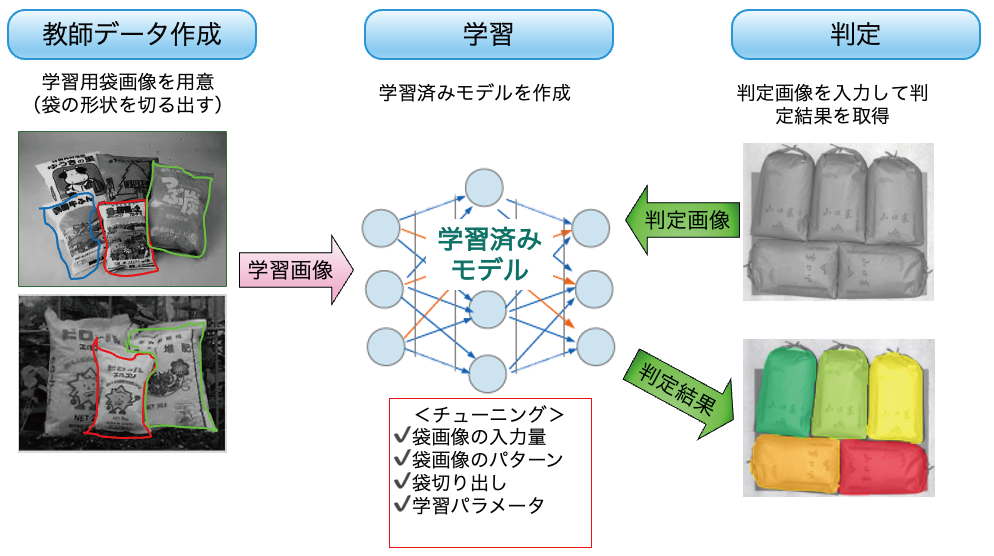
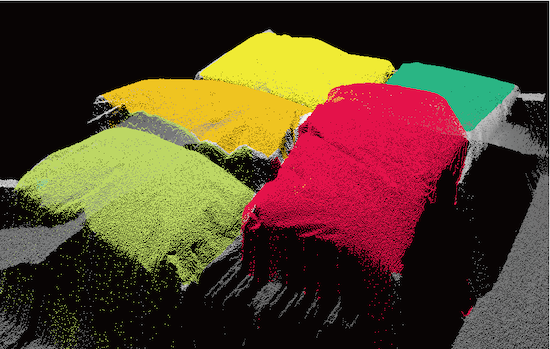
AI bag recognition software
Recognizing bags with uneven filling or overlapping bags, which was previously difficult, is now possible. By combining 3D robot vision and deep learning, it is now possible to reliably recognize irregularly shaped bags that are stacked on a pallet and overlapping. Furthermore, instead of relying solely on deep learning recognition, by using 3D and 2D data in combination, it outputs bag recognition and bag position/orientation recognition results that can be used in the field. ■ Prevention of misrecognition through dimension checks (size, aspect ratio, area ratio) ■ Detection of only the top bag to prevent picking products from the next lower layer first ■ Ability to set conditions such as the picking order of multiple products on the same layer
specification
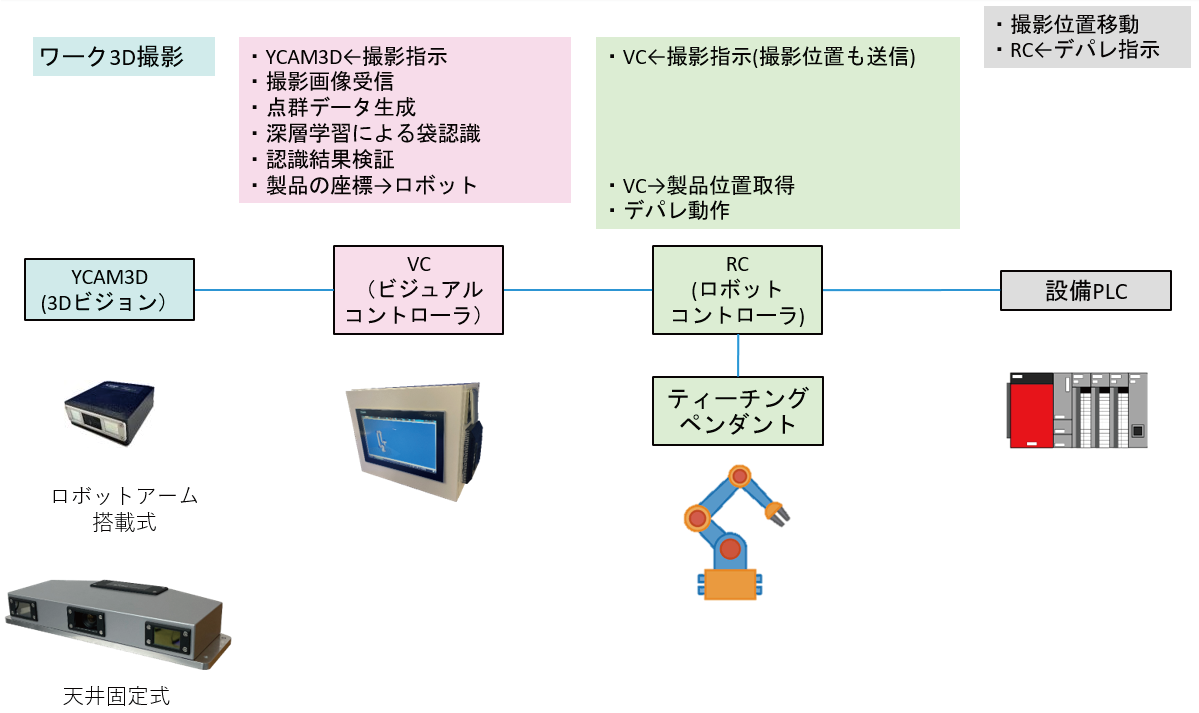
System configuration and operation flow
By using a pre-trained model specifically designed for bags, you can immediately recognize bags. The recognition rate can be improved by adding photos of actual workpieces (approximately 30-50 photos) using the following procedure.
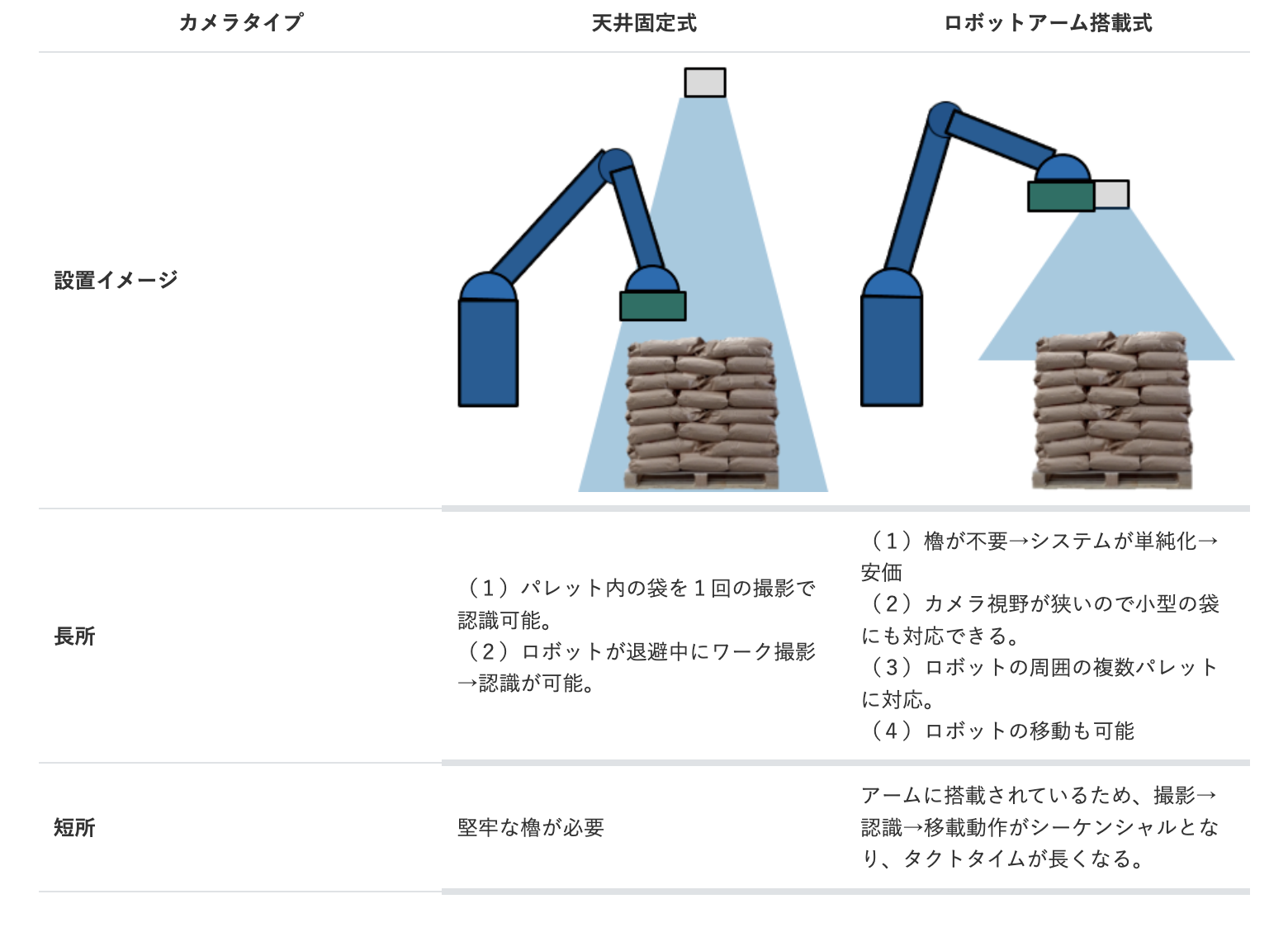
3D Vision Installation Plan
We provide 3D robot vision tailored to your work environment; both fixed vision and hand-eye vision are available.
Specifications
| Specification Items | Content |
|---|---|
| Recognition time | Image capture → Point cloud preprocessing: 0.7–1.0 seconds; AI recognition: approximately 0.6 seconds; Point cloud verification time: 0.5–2.0 seconds |
| Types of bags | We accept all bag sizes, materials, colors, and printing options. |
| Compatible robots | Yaskawa Electric, FANUC, Kawasaki Heavy Industries, Denso, Fujikoshi, UR, Mitsubishi Electric, and others. |
| Learning new work (bag) | Adding customer workpieces (bags) will improve the recognition rate. |
| calibration | Automatic error correction using a dedicated calibration board. |